
Quaternions and 3D rotations
Date:
Series of two introductory lectures given at The Riemann Academy, an extra-mural mathematics enrichment series for undergraduates at Stellenbosch University. The lectures briefly cover rotations in 2D & 3D, focussing on the use of the quaternions in describing 3D rotations.
Breakdown of talks
- 25/04/2024
- Notes (taken by Emma Theart): Zenodo / local,
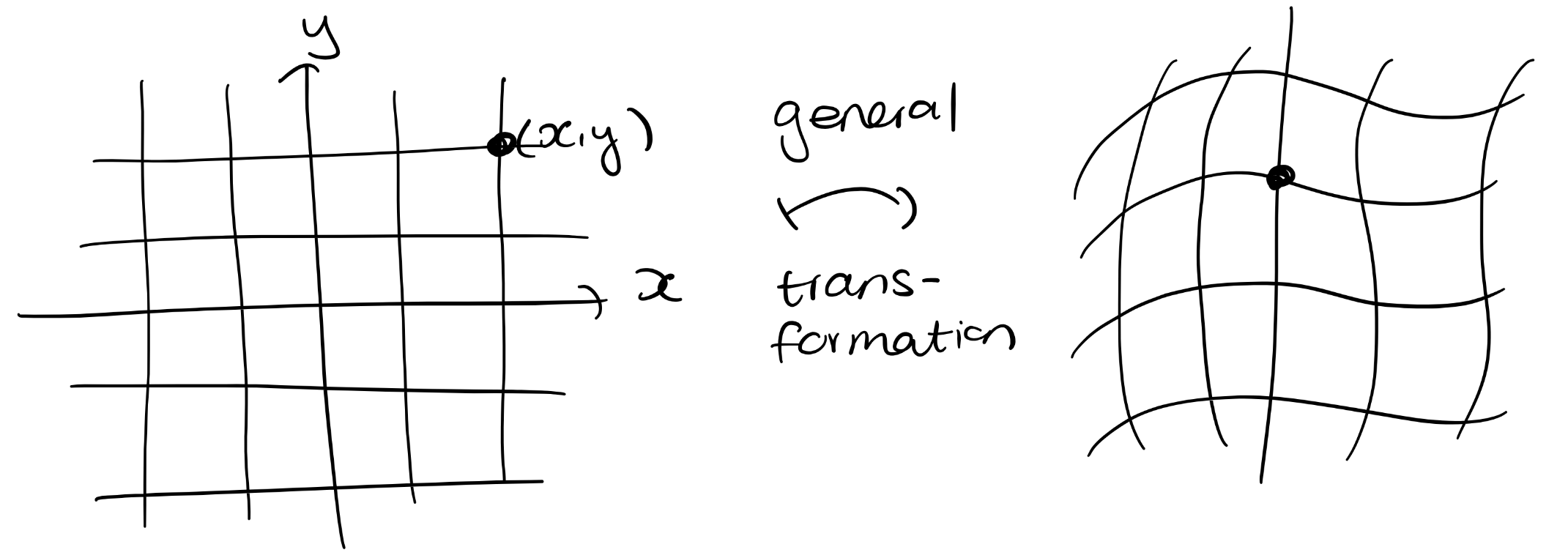
- We discuss the history of quaternions, before turning to rotations in 2D and their natural description in terms of the complex numbers. We briefly touch on linear transformations in general, and the structure of the rotation group $\mathrm{SO}(2)$.
Omissions from the talks & notes
Given the introductory nature of the talks, as well as limited time, I had to gloss over many important details. For further exploration, I pointed attendees to the excellent interactive lectures by Ben Eater and Grant Sanderson, as well as chapter 6 of Algebra and Geometry by Alan Beardon.
A few talking points from the lectures did not make it into the notes. In particular, I mentioned:
- that composition of 3D rotations is just multiplication of the quaternions describing each rotation,
- that the unit quaternions (which describe rotations) have the geometry of a hypersphere, which is different to the geometry of $\mathrm{SO}(3)$, and
- that the previous observation is because the unit quaternions double-cover $\mathrm{SO}(3)$.